|
in most
light conditions, except for outdoor light,
because of the high infrared output of the sun. Additionally,
the cameras triangulated the position of the user much more efficiently
than the ultrasonic system primarily because the speed of light
is substantially faster than the speed of sound. Finally, whereas
the sonar speakers sent signals in a more serial fashion, with
the infrared system the cameras took images simultaneously. A
new graphic version of the software, called Flashtrack, developed
for the infrared system, was written primarily by Badger.
Around the same time as the development
of the infrared system, APR received a CANARIE grant to develop
a networked version of the tracking system. This networked version
of the GAMS system is the current iteration in use and the focus
of the rest of this paper.
The networked GAMS system is
configured so that it uses a Control Centre to manage information
from one remote site to another. Positional data is passed to
the Control Centre and, then, onto the remote site so that a
remote user can be virtually present and control media over the
Internet. The positional data is passed on via UDP, an earlier
network protocol than TCPIP. UDP does not include error correction
and is, therefore, more effective for real-time media control.
In essence, the x, y, z positions comprising the 3D grid and
the speed of movement, or velocity, of the user are transmitted
to the Control Centre. The Control Centre can, then, pass this
positional and velocity information on to the remote site. Additionally,
the Control Centre can manage several "Universes" that
define who the remote users are, meaning a number of locations
can utilize the system at the same time.
This version resulted in a significant
shift in the way interaction could be enacted and the first instance
of telepresence using this system. Now, multiple users could
ostensibly interact together from different locations in their
own spaces and "see" one another in the system. More
importantly for this study, if one user moved her body and triggered
a robotic light in her space, that movement could occur at approximately
the exact time in the remote location, thus activating the robot
light telepresently. (Fig. 5)
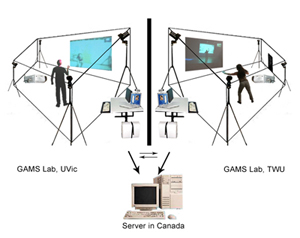
Figure 5. The networked system
|
Programming the space on a 3D
grid with this version of the system meant that media elements
could be placed in particular locations on that grid, essentially
creating zones where certain sounds, images, text, or any media
element could be found. Thus, when a performer enters a zone
where musical notes have been programmed, for example, these
notes are played as the performer passes her hand through that
zone. Performers, in this way, can play notes in any way they
wish, depending on the placement of the trackers. But not only
can the audience hear the notes played, but this information
is passed via the system over a high-speed internet connection
to the remote performer in his lab. The first art piece to use
the network version of tracking system was Virtual DJ by
Gibson, who gave a remote, networked performance from his location
in Victoria to another in Montréal in late 2002 for the
CANARIE conference. Running on a research network, the system
had a minimal amount of latency, around 70 ms., allowing for
relatively transparent interaction. Another remote version of
Virtual DJ was also performed at the NEXT 2.0 conference
between the University of Victoria and Karlstad, Sweden in May
2003. The latency in this performance was slightly more noticeable,
150-200 ms., because of the distance between the two locations.
In Fall 2004 a Canada Foundation
for Innovation grant awarded to Gibson made it possible for him,
working along with Bauer, to research ways to create behaviors
for the control of mediasuch as video, animation, and
imagesvia the Flash Track software and the Control
Centre. This work made it possible for positional information
to be sent from Flash Track to the Control Centre and, then,
onto a third computer running Macromedia Director and the behaviors
to allow the user to match locations in the room with videos
and images in Director and to manipulate these images files with
user movement.
The first piece to use this technology was When Ghosts Will
Die by Gibson and Dene Grigar, a performance-installation
that debuted in Dallas, Texas in April 2005 as a work-in-progress.
This experiment with interacting with media elements was repeated
with a networked performance of Virtual DJ, originally
a non-networked piece, by Gibson and Grigar in the summer 2005.
For that performance Gibson, working from his studio in Victoria,
BC, moved robotic lights and produced sound in Grigar's lab in
Denton, Texas while she simultaneously did the same in his from
her space. Documented on video, the work clearly demonstrates
the notion of embodied telepresence. The addition of webcam technology,
notably iSight and iChat, provided visual representation of each
remote performer in each local space, enhancing the sense of
performing together.
Since September 2005 recent changes
to the GAMS system include tagless tracking and voice activation
interaction, innovations that free the user from trackers or
wearables and facilitate the use of spoken word for commanding
behaviors. Bauer's Life Tastes Good, which debuted at
the Collisions conference in September 2005 at Victoria, Canada,
is the first art piece that utilized this version of GAMS. Because
no mediating device is needed between users and sensors, the
interaction is a direct relationship between human bodies and
machines across space.
3 GAMS' Application for Embodied Telepresent
Collaboration
As the previous section detailed,
the evolution of motion tracking technology, specifically the
system referred to as the Gesture and Media System, shifted interaction
from that of a single user interacting with sensors and computing
devices in a 2D space via ultrasonic frequencies to that of multiple
users interacting with
|